瞻智能科技有限公司")


仿真軟件")
")
")
")
光反饋檢測(cè)系統(tǒng)")
技術(shù)文章 |自動(dòng)駕駛中分心和接管方式的調(diào)查
發(fā)布時(shí)間:2020-09-17
瀏覽次數(shù):855
一、自動(dòng)化駕駛與接管請(qǐng)求簡(jiǎn)介
據(jù)世界衛(wèi)生組織統(tǒng)計(jì),2018年全球約有135萬(wàn)人喪生車(chē)禍。完全自動(dòng)駕駛的概念車(chē)是這個(gè)問(wèn)題的一個(gè)解決方案,但由于缺乏安全性,相關(guān)技術(shù)尚不成熟,這個(gè)夢(mèng)想2040年前基本無(wú)法實(shí)現(xiàn)。自動(dòng)化與工程學(xué)會(huì)定義了從“0”級(jí)到“5”級(jí)的自動(dòng)化駕駛水平。“0”級(jí)被認(rèn)為是沒(méi)有自動(dòng)控制的手動(dòng)駕駛車(chē)輛,而“5”級(jí)是完全自動(dòng)駕駛的車(chē)輛,無(wú)需人工駕駛。
在兩個(gè)極端水平(0級(jí)和5級(jí))之間,則是半自動(dòng)車(chē)輛。在半自動(dòng)(2級(jí)、3級(jí)和4級(jí))車(chē)輛中,人類(lèi)駕駛員的行為類(lèi)似于接線員。如果系統(tǒng)在臨界條件下運(yùn)行,或者系統(tǒng)向駕駛員發(fā)出接管請(qǐng)求,操作員可以監(jiān)視車(chē)輛行為并干預(yù)車(chē)輛。美國(guó)國(guó)家道路交通與安全管理局也推薦了自動(dòng)駕駛等級(jí)從“0”級(jí)逐步過(guò)渡到“5”級(jí)的政策。
第2級(jí)至第4級(jí)半自動(dòng)駕駛中,駕駛員的職責(zé)有點(diǎn)混亂,這會(huì)給駕駛員帶來(lái)困難,在混合駕駛條件下可能導(dǎo)致事故。世衛(wèi)組織還警告說(shuō),隨著混合駕駛情況下自動(dòng)化水平的逐步提高,到2030年,與事故相關(guān)的死亡人數(shù)可能會(huì)增加到200萬(wàn)。大多數(shù)情況下,由于對(duì)系統(tǒng)的信任,駕駛員會(huì)參與與其主要任務(wù)無(wú)關(guān)的其他活動(dòng),這些活動(dòng)被稱(chēng)為“非駕駛相關(guān)任務(wù)”(NDRT)。為了讓脫離循環(huán)的環(huán)節(jié)(非駕駛相關(guān)任務(wù))回到循環(huán)(進(jìn)行駕駛操作)中,使用了不同的策略,并名為接管請(qǐng)求(TORs)。
在高度自動(dòng)化車(chē)輛領(lǐng)域:接管請(qǐng)求是人機(jī)交互的主要研究領(lǐng)域之一。盡管世界各地的研究人員都在考慮不同類(lèi)型的接管請(qǐng)求模式,但在本次文獻(xiàn)調(diào)查中,我們僅考慮了以下條件:不同類(lèi)型的接管請(qǐng)求模式。即幫助分心的駕駛員回到回路中進(jìn)行駕駛或提醒駕駛員關(guān)注車(chē)輛狀態(tài)。
二、文獻(xiàn)調(diào)研的方法
自動(dòng)駕駛是近幾年來(lái)國(guó)內(nèi)外學(xué)者研究的熱點(diǎn)。研究團(tuán)隊(duì)在數(shù)字圖書(shū)館中發(fā)表了大量關(guān)于自動(dòng)駕駛的相關(guān)文獻(xiàn)。為了獲得與分心駕駛相關(guān)的最新文獻(xiàn),我們考慮了“IEEE Xplore”、“Science Direct”、“Google Scholar”、“ACM DL”、“Auto UI conference proceedings”和“ResearchGate”等文獻(xiàn)庫(kù)。許多關(guān)鍵字用于從網(wǎng)上圖書(shū)館查找文獻(xiàn)。這些詞包括“無(wú)人駕駛汽車(chē)中的人的反應(yīng)”、“人為因素”、“接管請(qǐng)求”、“自動(dòng)駕駛車(chē)輛中的接管請(qǐng)求”、“與駕駛無(wú)關(guān)的任務(wù)”、“環(huán)境光顯示”、“分心駕駛”、“照明任務(wù)”等。它引導(dǎo)我們分析了2309篇已發(fā)表的文章。
該方法包括3個(gè)步驟:
1)從數(shù)字圖書(shū)館中檢索已發(fā)表的文章
2) 篩選出最適合我們標(biāo)準(zhǔn)的文章
3)檢查和分析子參考文獻(xiàn),以獲得更多的文獻(xiàn)。
重復(fù)這個(gè)過(guò)程幾百次。我們只選擇了15篇符合我們“分心駕駛的接管請(qǐng)求模式”標(biāo)準(zhǔn)的論文。之所以分析了很多文章,只過(guò)濾出了少數(shù)幾篇文章,是因?yàn)樽詣?dòng)駕駛、接管請(qǐng)求、分心駕駛等未明確的搜索詞,導(dǎo)致我們找到了太多純粹與設(shè)計(jì)、自主車(chē)輛定位以及速度意識(shí)、行人意識(shí)等情境意識(shí)相關(guān)的文章。
三、概述
基于與駕駛無(wú)關(guān)的任務(wù)和自動(dòng)駕駛車(chē)輛中的接管請(qǐng)求模式這個(gè)篩選標(biāo)準(zhǔn),我們將20部精選出版的作品進(jìn)行分組,并對(duì)它們進(jìn)行總結(jié)。首先,我們定義了非駕駛相關(guān)任務(wù)和接管請(qǐng)求模式,然后總結(jié)出分組的文章。
用于幫助駕駛員持續(xù)參與、得到提醒并專(zhuān)注于駕駛或在分心后回到循環(huán)中的模式稱(chēng)為接管請(qǐng)求模式。布賴(lài)恩等人調(diào)查駕駛者駕駛自動(dòng)駕駛車(chē)輛時(shí)的行為,結(jié)果顯示駕駛者在駕駛時(shí)更傾向于將視線從道路上移開(kāi),且更傾向于將手從方向盤(pán)移開(kāi)。世界各地的研究人員定義并采用了五種不同類(lèi)型的接管請(qǐng)求模式,包括聽(tīng)覺(jué)、視覺(jué)、振動(dòng)、嗅覺(jué)刺激、人體刺激,如圖1所示。研究者大多采用一種以上的接管請(qǐng)求模式來(lái)考察駕駛績(jī)效。這是多模式的設(shè)置;而有些研究者只采用單一的接管請(qǐng)求模式作為單一模式的設(shè)置。
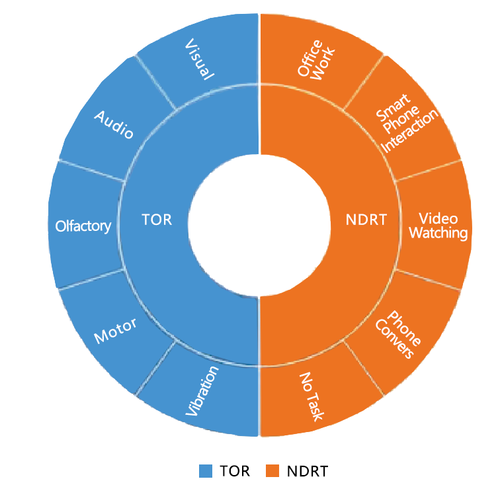
圖1 TOR和NDRT的種類(lèi)
A.單TOR模式
1)基于TOR的視覺(jué)刺激
該方法研究了基于可視中斷的接管請(qǐng)求。菲利普等人使用了一種新穎的概念,即在駕駛過(guò)程中通過(guò)手機(jī)或平板電腦發(fā)送通知。他們還考慮了接收請(qǐng)求時(shí)的車(chē)內(nèi)顯示屏。他們?cè)谑芸丨h(huán)境中對(duì)3級(jí)和4級(jí)車(chē)輛場(chǎng)景進(jìn)行模擬研究,所給出的結(jié)果很有趣,因?yàn)樵O(shè)備上出現(xiàn)的接管請(qǐng)求有助于駕駛員重新進(jìn)入循環(huán),并脫離與駕駛無(wú)關(guān)的任務(wù)。然而,基于移動(dòng)通知的接管請(qǐng)求并沒(méi)有很高的性能。薩賓等人在高級(jí)駕駛輔助系統(tǒng)(ADAS)的緊急情況下,通過(guò)在外圍視圖中使用亮度信號(hào)來(lái)警告駕駛員,盡管她在實(shí)驗(yàn)中沒(méi)有引入非駕駛相關(guān)任務(wù)的概念,但她介紹了一種能夠引起駕駛員注意的警報(bào)系統(tǒng)。
2)基于TOR的聽(tīng)覺(jué)刺激
音頻信號(hào)是最有效的接管請(qǐng)求方式,以引起駕駛員的注意。Fagerl?nn等人提出了將無(wú)線廣播無(wú)效化以引起駕駛員注意的概念。同樣,Wang等人調(diào)查發(fā)現(xiàn)聲音信號(hào)有助于保持駕駛員的注意力。但大多數(shù)關(guān)于音頻接收請(qǐng)求模式的出版物,要么沒(méi)有考慮到分心駕駛的干擾,要么就是在實(shí)驗(yàn)中使用了多種TOR模式。
3)基于TOR的嗅覺(jué)刺激
該方法提出了一種利用人的嗅覺(jué)來(lái)高效設(shè)計(jì)自主車(chē)輛多模式接收請(qǐng)求的新概念。秋陽(yáng)等人在接管請(qǐng)求中使用薄荷作為觸覺(jué)和聽(tīng)覺(jué)刺激的輔助。他們進(jìn)行了一個(gè)模擬機(jī)控制的環(huán)境實(shí)驗(yàn),結(jié)果表明,這不會(huì)影響人類(lèi)駕駛員的反應(yīng)時(shí)間,但會(huì)提高輕度睡眠中駕駛員的警覺(jué)性。
4)基于TOR的人體刺激
Sarah提出了一個(gè)新的人體刺激接管請(qǐng)求方式。在控制實(shí)驗(yàn)的第一部分;他們使用電刺激駕駛員的手臂,同時(shí)在模擬器上進(jìn)行復(fù)雜的非駕駛視覺(jué)駕駛?cè)蝿?wù)實(shí)驗(yàn)。在第二部分中,他們用傳統(tǒng)的音頻、振動(dòng)和視覺(jué)模式進(jìn)行了相同的實(shí)驗(yàn)。最后比較了基于反應(yīng)時(shí)間和接管時(shí)間的結(jié)果。結(jié)果表明,振動(dòng)帶來(lái)的反應(yīng)時(shí)間快,人體刺激次之。
B.基于TOR的多模式刺激
Naujoks、Petermeijer和Bazilinsky等人進(jìn)行了使用不同類(lèi)型模式的控制實(shí)驗(yàn),表明多模式刺激提供了更有效的結(jié)果,但在測(cè)試時(shí),他們只考慮了駕駛員的警覺(jué)性。Sol Hee等人在考慮模擬器受控環(huán)境中的非駕駛相關(guān)任務(wù)時(shí),研究了多模式刺激。他設(shè)計(jì)了四種類(lèi)型的非駕駛?cè)蝿?wù):沒(méi)有任務(wù),電話交談,智能手機(jī)交互和視頻觀看。結(jié)果表明,TOR的多模式交互設(shè)計(jì)具有重要意義。為評(píng)估駕駛員反應(yīng)過(guò)來(lái)駕駛汽車(chē)的反應(yīng)時(shí)長(zhǎng),Jungsook在運(yùn)動(dòng)模擬器中進(jìn)行一個(gè)在儀表板中間的屏幕上顯示一個(gè)視覺(jué)接管請(qǐng)求的實(shí)驗(yàn)。他的研究結(jié)果表明,駕駛員需要的反應(yīng)時(shí)間取決于他所涉及的非駕駛相關(guān)任務(wù)的類(lèi)型。Shadan等人在方向盤(pán)上引入視聽(tīng)接管請(qǐng)求方式的概念。在使用模擬器進(jìn)行試驗(yàn)時(shí),他們發(fā)現(xiàn)未來(lái)的交通預(yù)測(cè)系統(tǒng)會(huì)降低駕駛員的反應(yīng)時(shí)間(RT),但碰撞時(shí)間會(huì)(TTC)更快。然而,他們也發(fā)現(xiàn),參與非駕駛相關(guān)任務(wù)的程度不會(huì)影響用戶(hù)響應(yīng)。
四、評(píng)價(jià)方法
A、調(diào)查
為了更好地了解實(shí)驗(yàn)過(guò)程中參與者的行為、用戶(hù)體驗(yàn)、信任程度等方面,文獻(xiàn)采用了主觀研究的方法,包括實(shí)驗(yàn)期間和實(shí)驗(yàn)后的許多訪談問(wèn)題。大多數(shù)研究者使用修正的NASA任務(wù)負(fù)荷指數(shù)與主觀精神問(wèn)卷和用戶(hù)體驗(yàn)問(wèn)卷。一些研究人員還設(shè)計(jì)了自己的調(diào)查問(wèn)卷和訪談問(wèn)題,以便更好地理解參與者的心理。
B、計(jì)算
在接管請(qǐng)求分析中,我們發(fā)現(xiàn)反應(yīng)時(shí)間(RT)和接管時(shí)間(TOT)是用來(lái)評(píng)估在特定任務(wù)下效率的。我們還注意到,研究人員過(guò)去常常計(jì)算碰撞時(shí)間(TTC)、注視時(shí)間(FT)以及實(shí)際操作的計(jì)算任務(wù)。一般對(duì)心電圖進(jìn)行監(jiān)控,以獲得駕駛員的壓力和工作負(fù)荷狀態(tài)。在調(diào)查接管請(qǐng)求模式時(shí),還考慮了用于計(jì)算駕駛疲勞的眼睛跟蹤技術(shù)和眼睛注視數(shù)據(jù)。
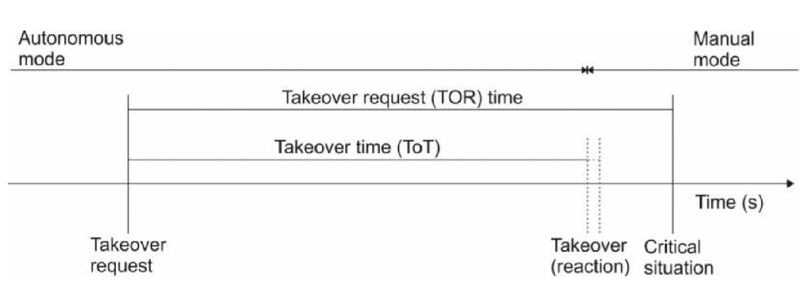
圖2 TOR時(shí)間線
C、 駕駛模擬器
研究和分析用戶(hù)反應(yīng)的一種最常見(jiàn)和最安全的方法是在受控環(huán)境中,所有的研究均在實(shí)驗(yàn)室里的模擬器上進(jìn)行。使用OPENDS等開(kāi)源的駕駛模擬器軟件進(jìn)行環(huán)境設(shè)計(jì),并對(duì)人的行為進(jìn)行了分析。結(jié)果表明該方法是可行的,有助于自動(dòng)駕駛汽車(chē)內(nèi)飾設(shè)計(jì)更加人性化。
 滬公網(wǎng)安備 31011002002705號(hào)
滬公網(wǎng)安備 31011002002705號(hào)