







技術文章丨在多種路況中近光燈、遠光燈以及防眩光遠光燈的眩光對比
發布時間:2020-05-22
瀏覽次數:853
1.引言
盡管夜晚的車流量大約為白天的1/5,但是大多數嚴重的車禍都是發生在夜晚。主要原因是人眼視覺的感知能力在夜晚會大幅下降。因此,提高駕駛員的可視性是十分必要的,尤其是在道路照明情況不佳或者沒有道路照明的情況下。傳統的遠光燈可以最大程度的提高駕駛員的可視性,但是同時也會給其他道路使用者造成眩光。另一方面,近光燈可以最小程度的對其他道路使用者造成眩光,但同時也降低了駕駛員的可視性。防眩光遠光燈系統結合了近光燈和遠光燈的優勢:在保證最佳的司機可視性的情況下避免對其他道路使用者產生眩光。它可以檢測到正在行駛的車輛或者迎面而來的車輛,從而控制配光分布。
如今,防眩光遠光燈應用十分廣泛。該車燈可以更早地檢測到目標,增加了駕駛安全性。所以問題在于該系統是否可以在不同的路況下檢測到其他道路使用者,并將該處的燈光減弱或關閉,避免對其他道路使用者造成眩光。
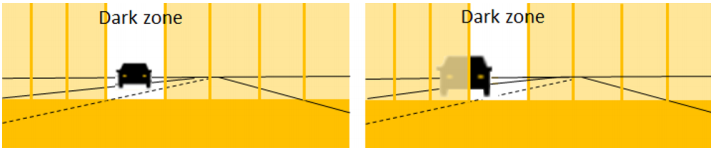
圖1 反應時間太長導致眩光示意圖
如圖1(左)所示,車燈系統檢測到一輛迎面而來的汽車,并在該車附近形成陰影。如果該車逐漸靠近,位置會不斷向左偏移,此時車燈需要關閉另外一部分燈光,如果沒有及時做出調整,迎面而來的汽車中的駕駛員就會感受到眩光。為了檢驗防眩光遠光燈系統的動態行為,我們做了以下研究。
2.實驗設計與方法
為了說明在現實路況中防眩光遠光系統的照度水平,我們在實驗中應用了兩輛汽車。其中一輛車為測試汽車,另一輛車為實驗汽車,如圖2所示。實驗汽車安裝了LED防眩光遠光燈,并以80km/h的速度勻速向另外一輛靜止的汽車行駛。測試汽車作為其他道路使用者,停在不同的位置。測試汽車在駕駛員眼位處安裝了光度計,用以測量駕駛員眼位照度。兩輛汽車均安裝了GPS接收器,用以計算二者之間的距離。
我們考慮了不同的路況,例如:相向行駛、十字路口、同向超車、彎道行駛,如圖2所示。

圖2 實驗路況示意圖
實驗汽車從900m處勻速向靜止的測試汽車行駛。測試汽車根據以上四種路況分別進行停放。實驗汽車的前照燈分別設置為近光燈、遠光燈和防眩光遠光燈,每次行駛結束后更改車燈類型。每次實驗重復七次,以避免誤差的產生。
3.結果和討論
以下我們根據實驗汽車與測試汽車之間的距離,對四種路況下駕駛員眼位的照度值進行了分析。
相向行駛

圖3 相向行駛路況實驗結果
三種車燈的平均照度值測試結果如上圖所示。自適應遠光燈系統可以準確地檢測到測試汽車。實驗結果顯示近光燈和防眩光遠光燈的實驗結果相近。

圖4 近光燈和防眩光遠光燈實驗結果放大圖
如圖4所示,當兩輛汽車之間的距離為150m左右時,兩條曲線之間偏移0.1lx,這是由防眩光遠光燈相鄰區域的散射光導致的。值得注意的是處于280m和130m時曲線產生的峰值,這可能是由于汽車行駛、顛簸或者自動調平系統導致的。因此,我們進行了準靜態測量,其中實驗汽車以5km/h的速度勻速向測試汽車行駛,實驗結果表明,導致峰值的原因是道路顛簸。
十字路口
測試汽車垂直于實驗汽車的行駛方向放置,如圖2所示。光度計朝向實驗車輛進行安裝。三種試驗車燈的測試結果如圖5所示。

圖5 十字路口路況實驗結果
如上圖所示,防眩光遠光燈與遠光燈的平均照度測試結果十分接近。這就意味著,測試汽車或者任何一輛位于十字路口的汽車處沒有形成陰影。因此,遠光燈的光線直接照射到了駕駛員的眼睛。
同向超車
實驗中實驗汽車于左側超越靜止的測試汽車,如圖2所示。兩輛汽車與光度計朝向均相同。
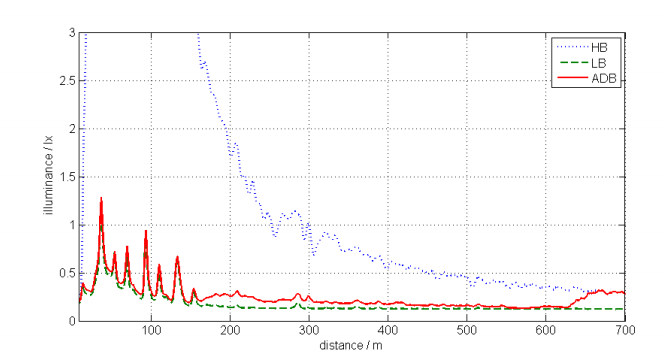
圖6 同向超車路況實驗結果
如圖6所示,兩輛汽車距離大于650m時,防眩光遠光燈和遠光燈的實驗結果十分接近。在較小距離內,防眩光遠光燈系統檢測到了測試汽車,并在該區域生成了陰影。這是通過關閉遠光燈相關區域光源形成的。因此,兩輛汽車距離小于150m時,防眩光遠光燈和近光燈的照度測試結果十分接近。這就意味著,防眩光遠光燈與近光燈會產生相當的眩光效果。根據我們的另一項研究,如果駕駛員眼位照度不超過2lx,被試就不會感受到眩光。
彎道行駛
在彎道行駛路況中,測試汽車位于彎道出口處,光度計安裝朝向實驗汽車。防眩光遠光燈7次重復測試的照度結果如圖7所示。

圖7 彎道行駛路況的實驗結果
實驗汽車與測試汽車之間的距離大于60m時,7次照度測試結果基本相同。兩輛車之間的距離為40m左右時,照度測試結果范圍為1.5lx-11.4lx。這就意味著,有時會在測試汽車處產生陰影,有時不會。產生這樣結果的原因可能是反應時間較長或者在轉彎處沒有進行功能再現。
4.結論
本文對不同路況下防眩光遠光燈對其他道路使用者產生的眩光情況進行了研究。在十字路口路況中,沒有在測試汽車處形成陰影,這會導致產生眩光的風險。在同向超車路況中,防眩光遠光燈系統會做出相應的反應,其照明水平與近光燈相近。由于防眩光遠光燈反應時間較長或者在轉彎處沒有進行功能再現,在轉彎過程中測試結果不統一。防眩光遠光燈可以檢測到迎面行駛的車輛,而且測試照度值與近光燈相近。
 滬公網安備 31011002002705號
滬公網安備 31011002002705號